周报:2021-1-18~2021-1-24
本周工作:
Xiong Z , Wang L , Li H , et al. Snapshot Hyperspectral Light Field Imaging[C]// 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2017.
Single-shot three-dimensional imaging with a scattering layer
Rueda H , Arguello H , Arce G R . High-dimensional optimization of color coded apertures for compressive spectral cameras[C]// 2017 25th European Signal Processing Conference (EUSIPCO). 2017.
Paper 1
Title
《散射层快照高光谱成像》
Single-shot three-dimensional imaging with a scattering layer
Contents
本文提出了一种基于 Scattering layer 的快照式高光谱相机,通过将一片薄散射层(scattering layer)放置于一个2D成像传感器前,形成一个 类光场相机。利用散射层散射出的光斑具有 数据独立性和空间遍历性 的特征,来实现三维重建(注:此处的第三维 是指 深度 维度)。
Theory
散射层具备自己独特的Point spread function (PSF),理论表示如下:
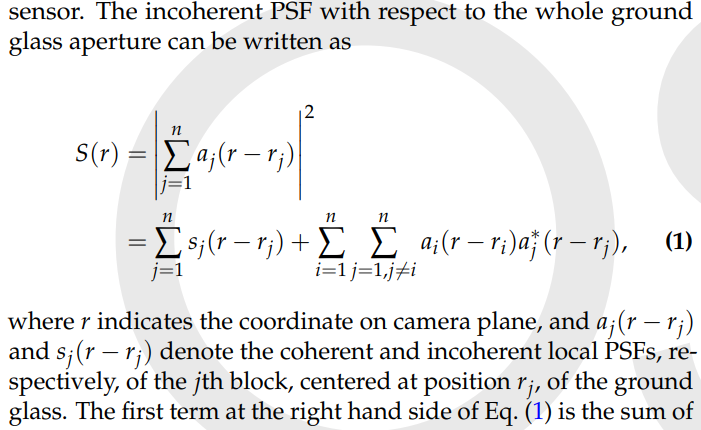
将统计学理论应用,$s_j$和$S(r)$的协方差可以表示为:
散射层散射出的光斑图样具有统计学特征,充分发展的光斑图样具有沿中心呈负指数分布的特点,其方差等于均值的平方,基于moment factoring theorem 和 Van Cittert - Zernike theorem,上面的式子可以简化为:
其中$\Gamma_j(r)$ 代表block函数的功率谱。
根据傅里叶切片定理,可以证明:
Calibration
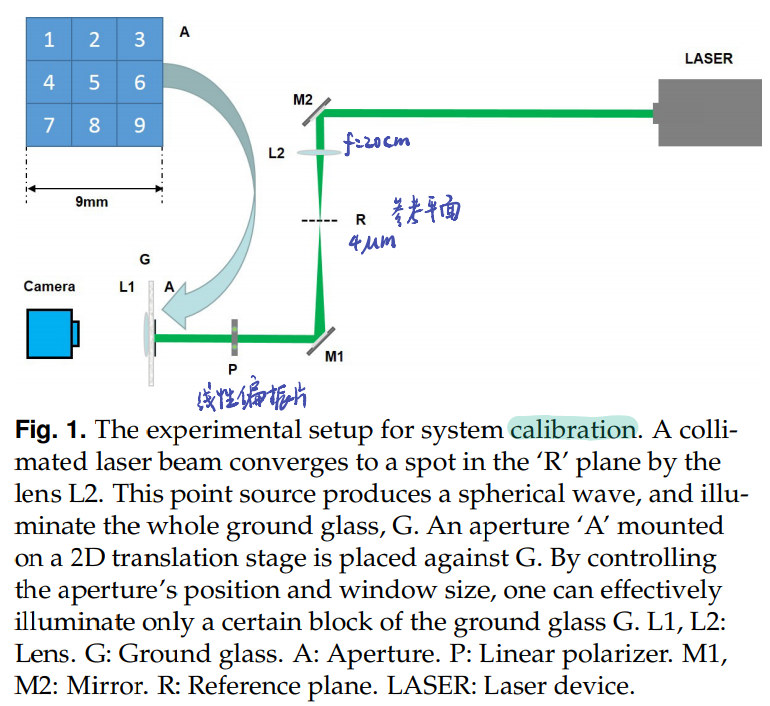
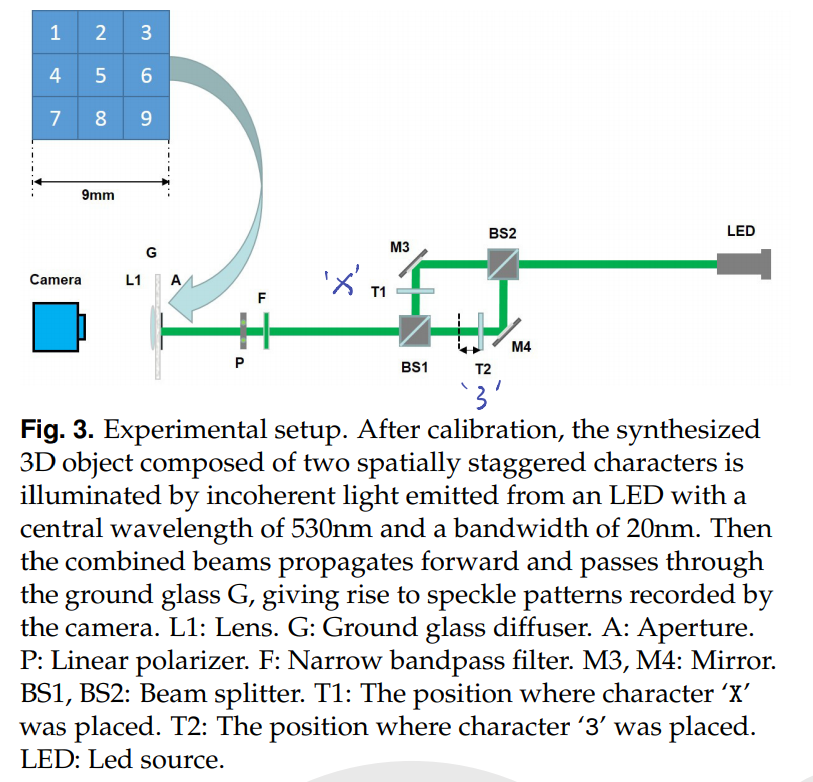
本文将scattering layer 放置在一个多孔孔径后面,通过开关孔径窗口实现指定位置的scattering layer的打开与关闭。
在标定过程种,本文应用了沿着深度方向上的按比例放大缩小的近似原理:
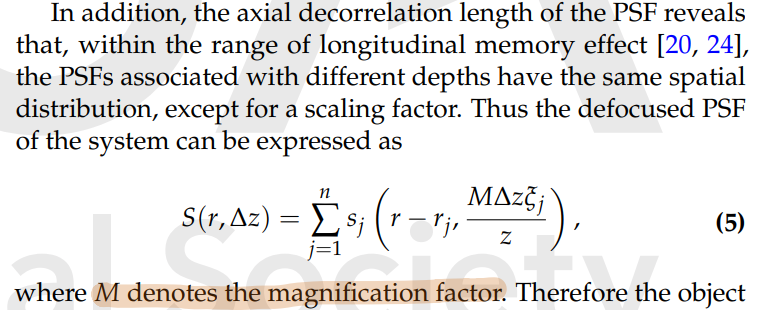
因此,只需要在一个参考深度下标定一个2D平面的点即可。
Experiment
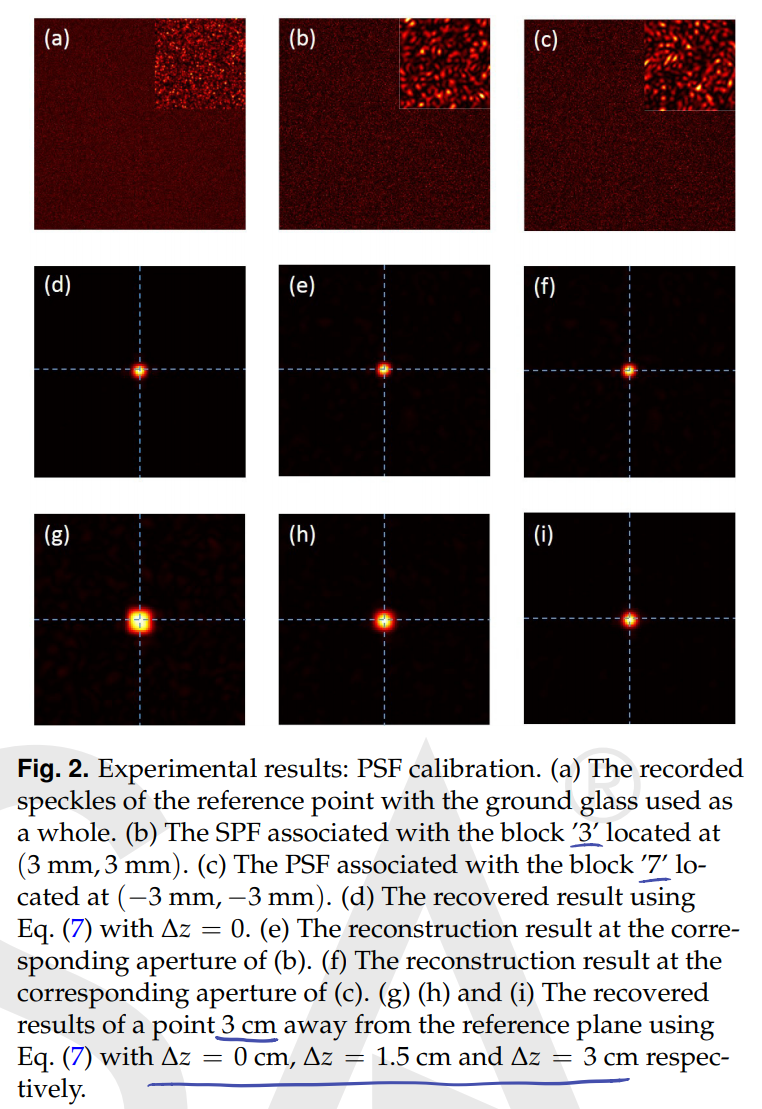
本文以9个正方形孔为例,首先轮流打开每一个小孔并标定PSF,最后通过全开所有孔测出所测物体在scattering layer成像所形成的光斑图像,然后应用理论,将该图像与每一个孔的PSF求协方差,得到每个孔角度下的该物体的成像。
标定实验图:
成像实验中,在不同深度(深度差为5cm)放置了两个物体:X 和 3
成像实验图:
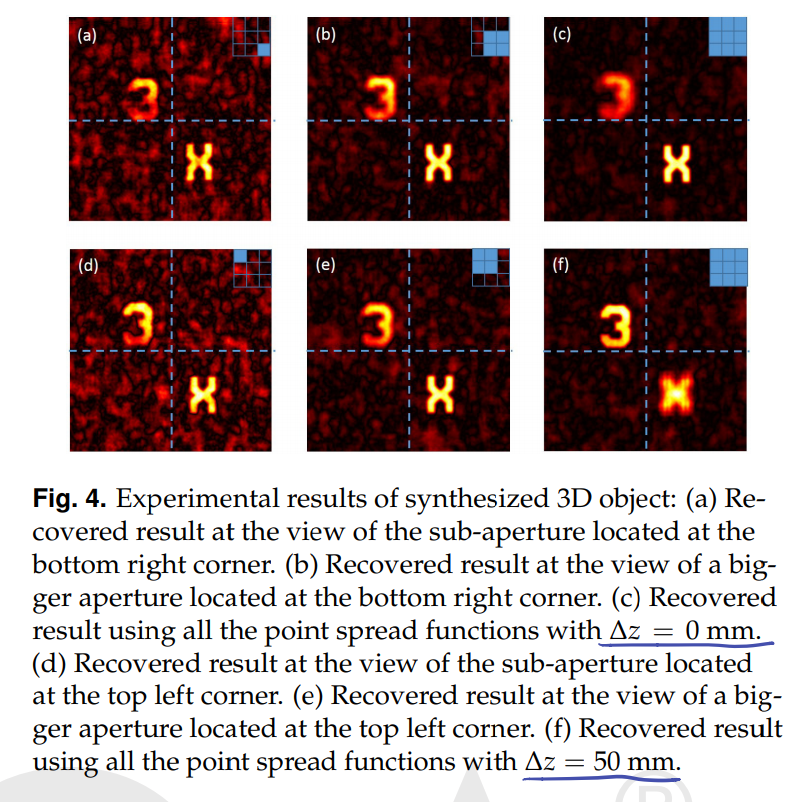
Results
可以看出,在开不同窗口时,位于焦平面上的X并没有受到影响,但是不在焦点处的3的光强具有显著变化,当全开窗口时,可以明显看出来深度上的差异,同时,图(f)将PSF中的$\Delta z$调为了50cm,因此此刻呈现的图像等价于3处在焦平面上。
Paper 2
Title
《高维彩色编码孔径最优化下的压缩光谱成像》
Rueda H , Arguello H , Arce G R . High-dimensional optimization of color coded apertures for compressive spectral cameras[C]// 2017 25th European Signal Processing Conference (EUSIPCO). 2017.
Contents
本文提出了一种编码孔径最优化设计方案,并利用迭代算法实现,相对于传统的随机生成编码孔径有8dB的提高。
Theory
作者将RIP条件中的矩阵$\mathbf {A_{|\rho||\rho|}}$:
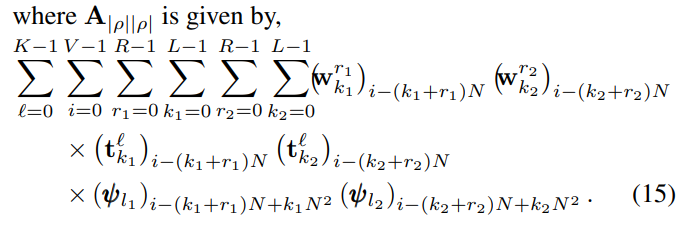
中的关于编码孔径的一项单独拎出来作为一个系数$\beta$:
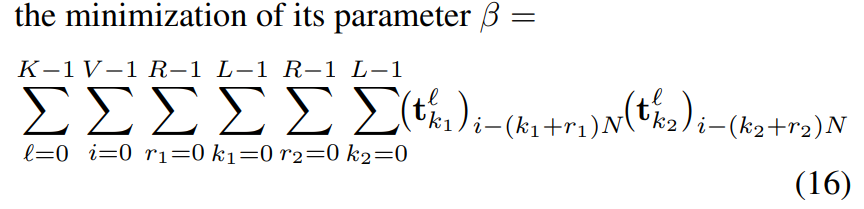
RIP条件证明我们需要使系数$\beta$越小越好,因此需要寻找上式最小值时的矩阵$\mathbf t$,将编码孔径矩阵拆分为三维结构形式$(R+L)\times (R+L)\times L$,并将优化问题写成如下形式:
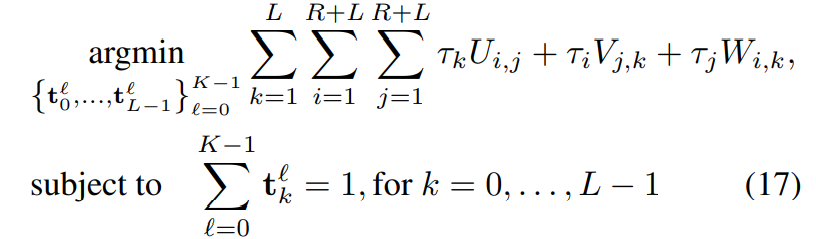
其中 $U{i,j},V{i,j},W{i,j}$分别代表 $x-y,y-\lambda,x-\lambda$的控制项,$\tau{i/j/k}$为权重系数。
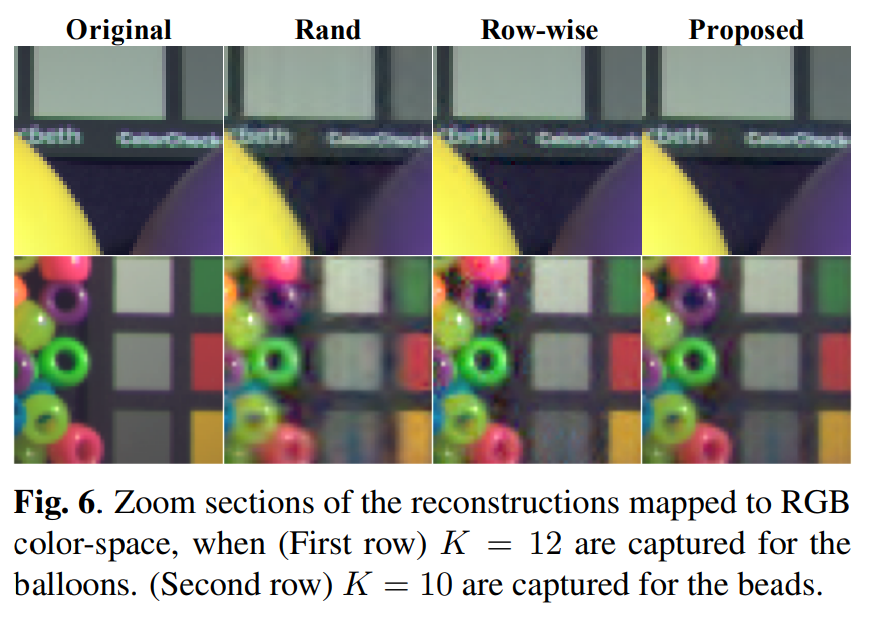
作者提出了新的迭代算法实现这样的优化问题求解:
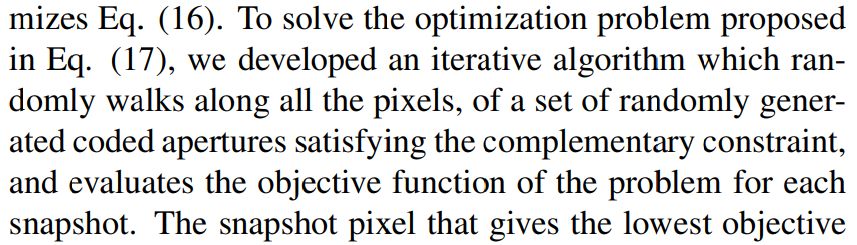
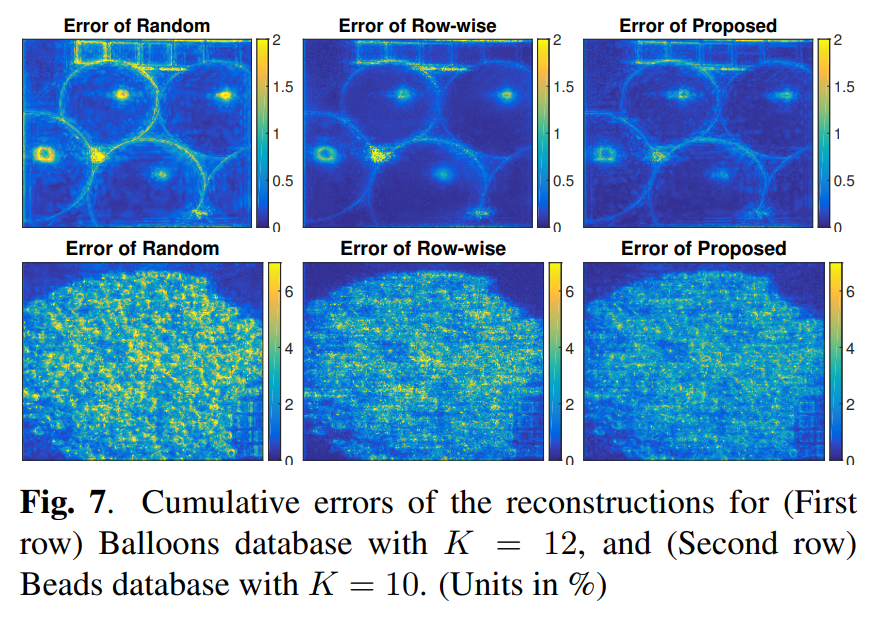
Results
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!